Jinhan Li

I am Jinhan Li (李谨菡), a senior-year undergraduate student majoring in Computer Science and Technology at IIIS, Tsinghua (a.k.a. Yao Class, directed by Andrew Chi-Chih Yao). I was very fortunate to work as a student intern in Professor Yuke Zhu’s group at UT Austin and Professor Yi Wu’s group at IIIS.
My research interests lie broadly in machine learning. I’m attracted to research that integrates empirical observations with rigorous experiments and theoretical analysis, offering insights into modern machine learning techniques. I aspire to not only apply these techniques effectively, but also develop a deep understanding of when and why they work or fail, and ultimately working toward enhanced reliability. Previously, I worked on robot learning.
I’m open to chatting about research or life, and enjoy wandering around with different people. Feel free to drop me an email if you are interested in chatting or hanging out!
News
Selected Publications
2024
-
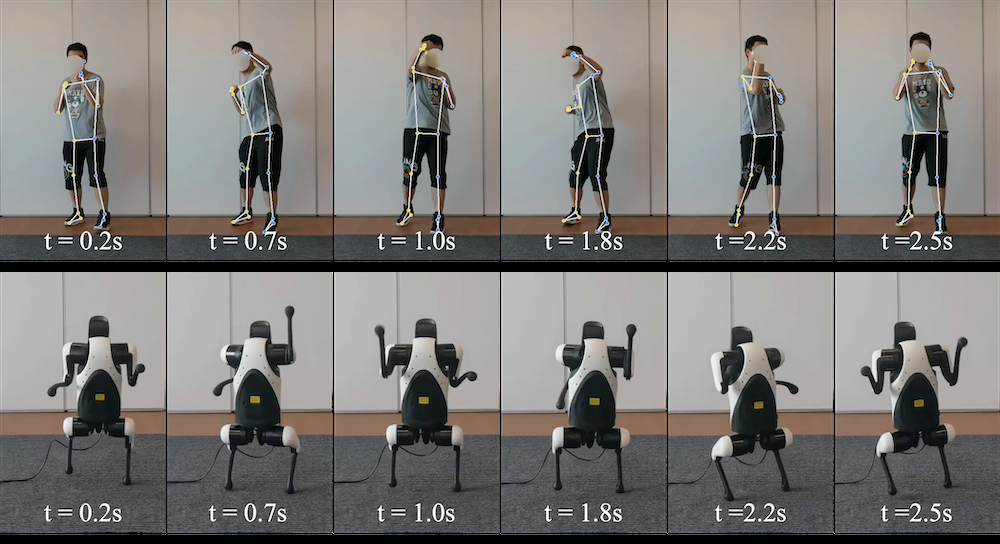 Learning Agile Bipedal Motions on a Quadrupedal RobotIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
Learning Agile Bipedal Motions on a Quadrupedal RobotIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024ICRA EXPO Best Demo Finalist



